“具身智能”连续二年被写入政府工作报告,政策定调之下,产业落地已经跟上。年初,智元就推出了第二代一体化具身大小脑系统GenieReasoner,实验结果表明在统一离散空间内进行联合训练,大幅提升了模型的泛化性与指令跟随能力。
同期,阿里达摩院开源具身智能大脑基础模型RynnBrain,首次让机器人具备“时空记忆”与“空间推理”能力。
目前业内对“大脑”与“小脑”的处理方式正在形成明显分化:
政策东风已至,但落地靠的是真本事,很多同学想入行新兴行业学习却苦于没有成体系的学习资料。
零教程,具身智能大小脑不知道如何上手?
我们联合业内知名具身智能算法专家,为大家梳理了一套完成的具身大脑+小脑算法体系,并配有大量的实践。助力学习与落地,无论是初学者还是需要进阶的同学都能受益!
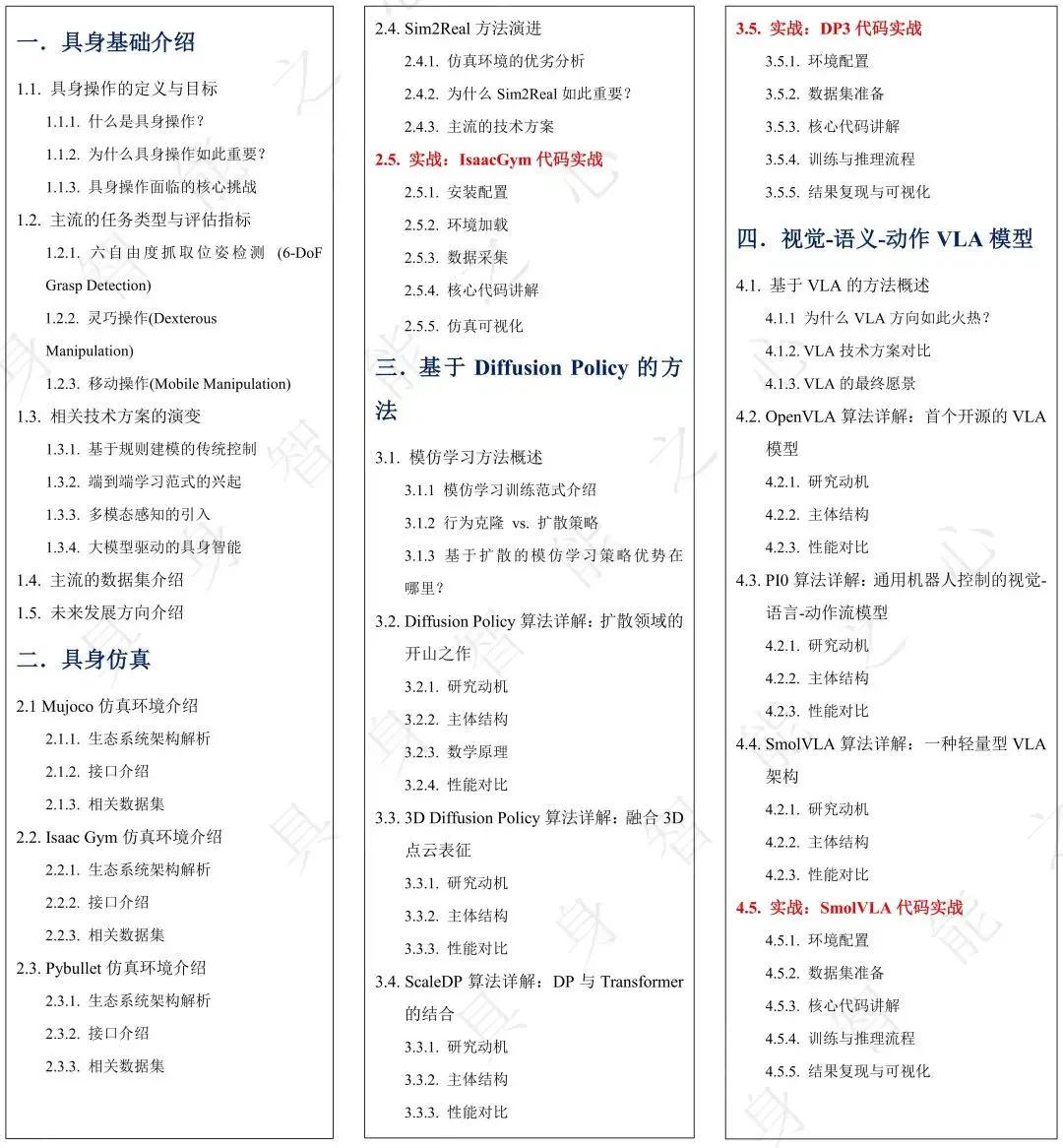
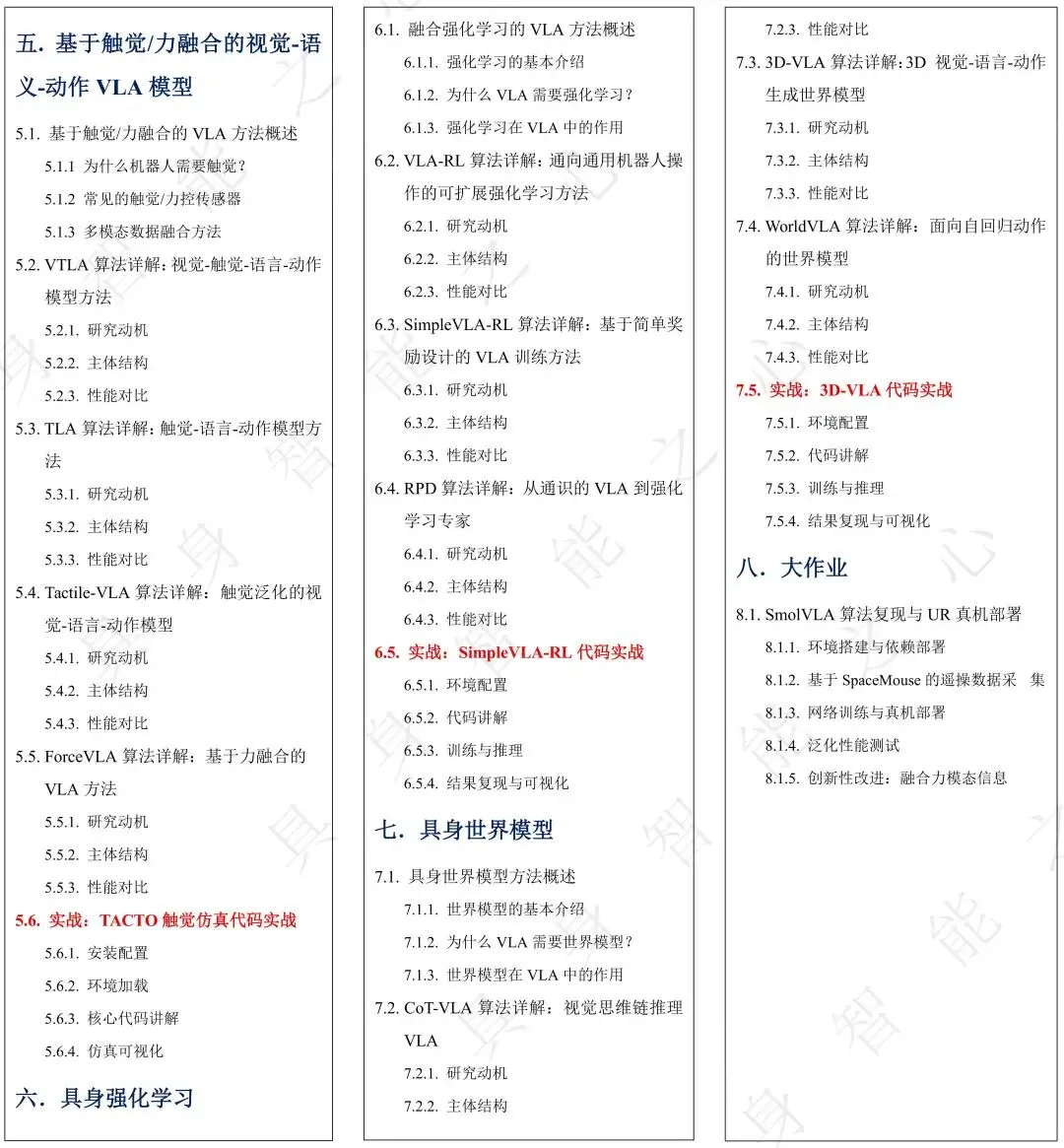
具身大脑与小脑全栈教程
我们为大家梳理了从灵巧操作、移动操作的基础任务->具身仿真体系与框架->Diffusion Policy->VLA->VLA+触觉->VLA+强化学习->具身世界模型等领域。每个模块都配有实战,后面更有大作业监督大家成果与学习内容。大纲一览如下:
从研究走向落地,工程与系统能力需求激增。随着产业界的重视,具身智能从“论文”走向“部署”,对工程能力提出更高要求,本课程目标与面向内容:
如何在Mujoco / IsaacGym / Pybullet等平台完成策略训练与仿真测试?
如何训练并部署Diffusion Policy / VLA / 力触融合的VLA模型?
如何实现强化学习在VLA后训练上的应用,支持机器人的反馈微调?
如何实现从世界建模预测→策略学习→物理执行的一体化具身智能架构?
日常的一些交流
群内非常活跃,老师日常答疑和提供资料分享!

基础要求
- 熟悉具身智能基本功能和任务,对具身领域有较大的学习兴趣;
- 一定的Python和Pytorch基础,显卡3090ti及以上算力;
适合人群
- 从事VLA/RL、移动操作、世界模型相关方向研究的本科、硕士、博士生;
- 希望从传统计算机视觉(CV)或自动驾驶领域转行进入具身智能的专业人士;
学后收获
- 能够掌握具身大脑+小脑算法的全体系知识点,熟悉如何优化自己模型;
- 能够掌握仿真、DP、VLA、VLA+RL模型的基本原理和实际应用;
- 掌握基于触觉信息的VLA主流方案,以提升机器人系统的智能化水平;
- 获得实用的技能,包括模型训练、数据处理的基本方法;
- 学习课程后,达到1-2年左右具身算法从业者的经验;
开课说明
本课程线上离线视频教学+vip群内答疑,由于为虚拟商品,购买后不支持退款,购买后1年内支持反复观看!9.15正式开课。
咨询我们
扫码学习课程

咨询小助理了解更多